
2022-01-31 Formulation
Contents
2022-01-31 Formulation¶
Wednesday (Feb 2) we’ll be back in person (if you want to be) in FLMG 157.
Last time¶
Derive Newton’s method via fixed point convergence theory
Newton methods in computing culture
Today¶
Breaking Newton’s method
Exploration
Multiple roots
Conditioning of the rootfinding problem
Forward and backward stability
using Plots
default(linewidth=4, legendfontsize=12)
function newton_hist(f, fp, x0; tol=1e-12)
x = x0
hist = []
for k in 1:100 # max number of iterations
fx = f(x)
fpx = fp(x)
push!(hist, [x fx fpx])
if abs(fx) < tol
return vcat(hist...)
end
x = x - fx / fpx
end
end
fp (generic function with 1 method)
Formulations are not unique (functions)¶
If \(x = g(x)\) then
g(x) = cos(x)
gp(x) = -sin(x)
h(x) = -1 / (gp(x) - 1)
g3(x) = x + h(x) * (g(x) - x)
plot([x-> x, cos, g3], ylims=(-5, 5))

We don’t know \(g'(x_*)\) in advance because we don’t know \(x_*\) yet.
This method converges very fast
We actually just derived Newton’s method.
Newton’s method by fixed point convergence¶
A rootfinding problem \(f(x) = 0\) can be converted to a fixed point problem
\[x = x + f(x) =: g(x)\]but there is no guarantee that \(g'(x_*) = 1 + f'(x_*)\) will have magnitude less than 1.Problem-specific algebraic manipulation can be used to make \(|g'(x_*)|\) small.
\(x = x + h(x) f(x)\) is also a valid formulation for any \(h(x)\) bounded away from \(0\).
Can we choose \(h(x)\) such that
\[ g'(x) = 1 + h'(x) f(x) + h(x) f'(x) = 0\]when \(f(x) = 0\)?
In other words,
Quadratic convergence!¶
What does it mean that \(g'(x_*) = 0\)?
It turns out that Newton’s method has locally q-quadratic convergence to simple roots,
\[\lim_{k \to \infty} \frac{|e_{k+1}|}{|e_k|^2} < \infty.\]“The number of correct digits doubles each iteration.”
Now that we know how to make a good guess accurate, the effort lies in getting a good guess.
Rootfinding methods outlook¶
Newton methods are immensely successful
Convergence theory is local; we need good initial guesses (activity)
Computing the derivative \(f'(x)\) is intrusive
Avoided by secant methods (approximate the derivative; activity)
Algorithmic or numerical differentiation (future topics)
Bisection is robust when conditions are met
Line search (activity)
When does Newton diverge?
More topics
Find all the roots
Use Newton-type methods with bounds
Times when Newton converges slowly
Exploratory rootfinding¶
Find a function \(f(x)\) that models something you’re interested in. You could consider nonlinear physical models (aerodynamic drag, nonlinear elasticity), behavioral models, probability distributions, or anything else that that catches your interest. Implement the function in Julia or another language.
Consider how you might know the output of such functions, but not an input. Think from the position of different stakeholders: is the equation used differently by an experimentalist collecting data versus by someone making predictions through simulation? How about a company or government reasoning about people versus the people their decisions may impact?
Formulate the map from known to desired data as a rootfinding problem and try one or more methods (Newton, bisection, etc., or use a rootfinding library).
Plot the inverse function (output versus input) from the standpoint of one or more stakeholder. Are there interesting inflection points? Are the methods reliable?
If there are a hierarchy of models for the application you’re interested in, consider using a simpler model to provide an initial guess to a more complicated model.
Equation of state example¶
Consider an equation of state for a real gas, which might provide pressure \(p(T, \rho)\) as a function of temperature \(T\) and density \(\rho = 1/v\).
An experimentalist can measure temperature and pressure, and will need to solve for density (which is difficult to measure directly).
A simulation might know (at each cell or mesh point, at each time step) the density and internal energy, and need to compute pressure (and maybe temperature).
An analyst might have access to simulation output and wish to compute entropy (a thermodynamic property whose change reflects irreversible processes, and can be used to assess accuracy/stability of a simulation or efficiency of a machine).
The above highlights how many equations are incomplete, failing to model how related quantities (internal energy and entropy in this case) depend on the other quantities. Standardization bodies (such as NIST, here in Boulder) and practitioners often prefer models that intrinsically provide a complete set of consistent relations. An elegent methodology for equations of state for gasses and fluids is by way of the Helmholtz free energy, which is not observable, but whose partial derivatives define a complete set of thermodynamic properties. The CoolProp software has highly accurate models for many gasses, and practitioners often build less expensive models for narrower ranges of theromdynamic conditions.
Roots with multiplicity¶
There are multiple ways to represent (monic) polynomials
poly_eval_prod(x, a) = prod(x .- a)
function poly_eval_sum(x, b)
sum = 1
for c in b
# This is known as Horner's rule
sum = x * sum + c
end
sum
end
eps = 1e-10
a = [1e5, 1e5*(1)] # tiny perturbation to root
b = [-(a[1] + a[2])*(1), # tiny perturbation to monomial coefficent
a[1]*a[2]]
f(x) = poly_eval_prod(x, a)
g(x) = poly_eval_sum(x, b)
g (generic function with 1 method)
plot([f, g], xlims=(a[1]-2, a[2]+2), ylims=(-3, 3))
plot!(zero, color=:black, label=:none)

Perturbing the coefficient in the tenth digit made the difference between one root and two.
The distance between the roots was big when \(b_1\) was perturbed.
How did the roots move?¶
Take two roots at \(x=a\) and perturb the middle coefficient.
Analytically, we know the roots are at
plot([x->x, sqrt], xlims=(0, .1))

Note that condition number is well behaved.
What does Newton find?¶
hist = newton_hist(g, x -> 2*x + b[1], 1.1e5; tol=1e-14)
25×3 Matrix{Float64}:
110000.0 1.0e8 20000.0
105000.0 2.5e7 10000.0
102500.0 6.25e6 5000.0
101250.0 1.5625e6 2500.0
100625.0 390625.0 1250.0
1.00312e5 97656.2 625.0
1.00156e5 24414.1 312.5
1.00078e5 6103.52 156.25
1.00039e5 1525.88 78.125
1.0002e5 381.47 39.0625
1.0001e5 95.3674 19.5312
1.00005e5 23.8419 9.76562
1.00002e5 5.96046 4.88281
1.00001e5 1.49012 2.44141
1.00001e5 0.372528 1.2207
1.0e5 0.093132 0.610353
1.0e5 0.023283 0.305179
1.0e5 0.00582123 0.152593
100000.0 0.00145531 0.0762955
100000.0 0.000364304 0.0381463
100000.0 9.15527e-5 0.0190459
100000.0 2.28882e-5 0.00943207
100000.0 5.72205e-6 0.0045788
100000.0 1.90735e-6 0.00207943
100000.0 0.0 0.000244935
plot(hist[:,1], hist[:,2], seriestype=:path, marker=:auto)
plot!(g, title="Root $(hist[end,1])", alpha=.5)
plot!(zero, color=:black, label=:none)

Convergence is kinda slow.
The solution is not nearly as accurate as machine precision.
Using Polynomials¶
Julia has a nice package to evaluate and manipulate polynomials. The coefficients are given in the other order \(b_0 + b_1 x + b_2 x^2 + \dotsb\).
using Polynomials
@show fpoly = Polynomial([2, -3, 1])
@show gpoly = fromroots([1, 2] .+ 1e5)
derivative(gpoly)
fpoly = Polynomial([2, -3, 1]) = Polynomial(2 - 3*x + x^2)
gpoly = fromroots([1, 2] .+ 100000.0) = Polynomial(1.0000300002e10 - 200003.0*x + 1.0*x^2)
newton_hist(gpoly, derivative(gpoly), 3)
23×3 Matrix{Float64}:
3.0 9.9997e9 -199997.0
50002.2 2.49993e9 -99998.5
75001.9 6.24981e8 -49999.3
87501.7 1.56245e8 -24999.6
93751.6 3.90613e7 -12499.8
96876.5 9.76533e6 -6249.91
98439.0 2.44133e6 -3124.95
99220.3 6.10333e5 -1562.48
99610.9 1.52583e5 -781.239
99806.2 38145.7 -390.62
99903.8 9536.37 -195.311
99952.7 2384.03 -97.6582
99977.1 595.945 -48.8342
99989.3 148.924 -24.4273
99995.4 37.1686 -12.2341
99998.4 9.23006 -6.15794
99999.9 2.24666 -3.16017
1.00001e5 0.505424 -1.7383
1.00001e5 0.0845398 -1.15679
100001.0 0.0053409 -1.01063
100001.0 2.79285e-5 -1.00006
100001.0 7.85803e-10 -1.0
100001.0 0.0 -1.0
Finding all roots of polynomials¶
roots(Polynomial([1e10, -2e5*(1 + 1e-10), 1]))
2-element Vector{Float64}:
99998.58579643762
100001.41422356237
p = fromroots([0., 1., 2, 3] .+ 1e3)
xs = roots(p)
scatter(real(xs), imag(xs), color=:red)
for i in 1:100
r = randn(length(p)) # normally distributed mean 0, stddev 1
q = copy(p)
q[:] .*= 1 .+ 1e-10 * r
xs = roots(q)
scatter!(real(xs), imag(xs), markersize=1)
end
plot!(legend=:none)

Fundamental Theorem of Algebra¶
Every non-zero, single-variable, degree \(n\) polynomial with complex coefficients has, counted with multiplicity, exactly \(n\) complex roots.
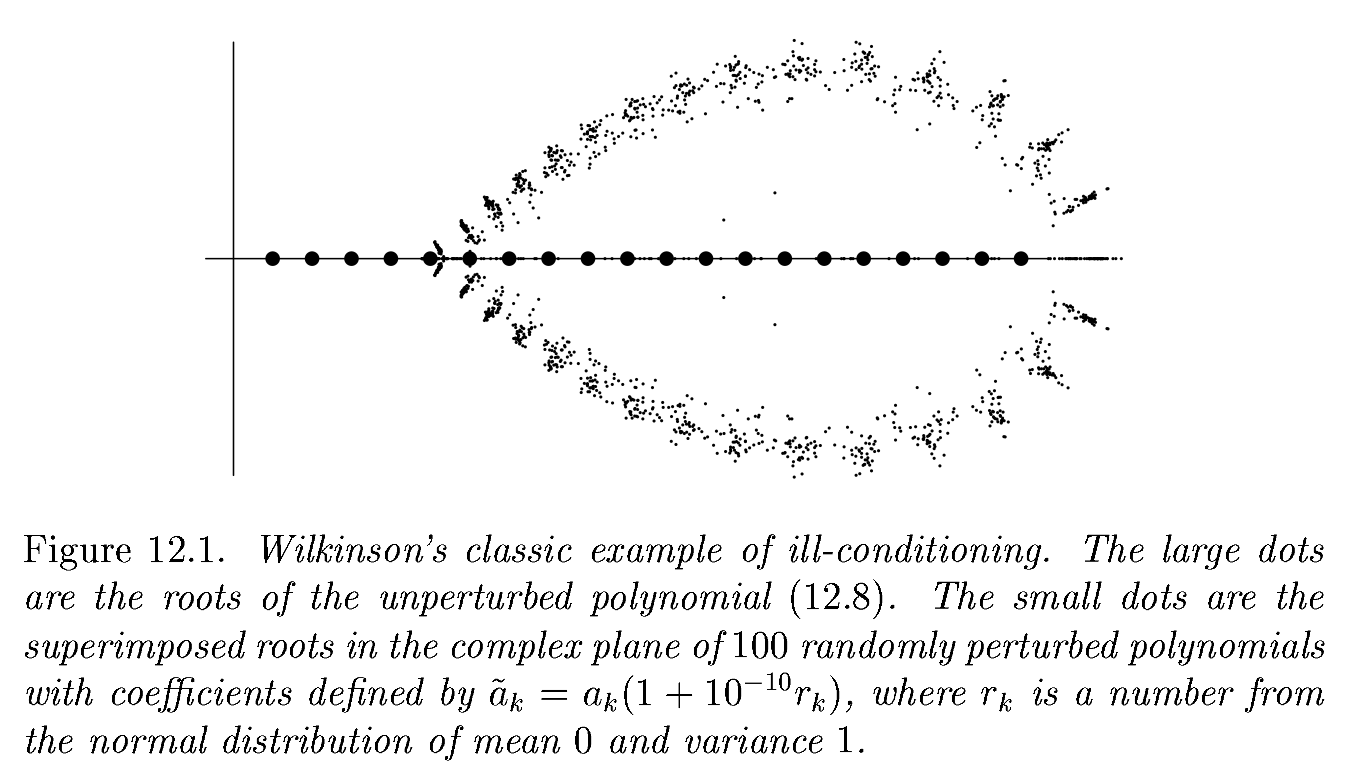
Wilkinson’s polynomial¶
Suppose we add more terms
n = 20
a = collect(1.:n)
w = fromroots(a)
w[10] *= 1 + 1e-12
plot(x -> abs(w(x)), xlims=(0, n+1), yscale=:log10)

w = fromroots(a)
scatter(a, zero(a), color=:red)
for i in 1:100
r = randn(length(w))
q = copy(w)
q[:] .*= 1 .+ 1e-10 * r
xs = roots(q)
scatter!(real(xs), imag(xs), markersize=1)
end
plot!(legend=:none)

Which is better to model inputs to a rootfinder?¶
A: coefficients \(a_k\) in
\[p(x) = \prod_k (x - a_k)\]
B: coefficients \(b_k\) in
\[p(x) = \sum_k b_k x^k\]
Figure from Trefethen and Bau (1999)¶
Forward vs backward error and stability¶

Stability¶
“nearly the right answer to nearly the right question”
Backward Stability¶
“exactly the right answer to nearly the right question”
Every backward stable algorithm is stable.
Not every stable algorithm is backward stable.
Map angle to the unit circle¶
theta = 1 .+ LinRange(0, 3, 100)
scatter(cos.(theta), sin.(theta), legend=:none, aspect_ratio=:equal)

theta = LinRange(1., 1+2e-5, 100)
mysin(t) = cos(t - (1e10+1)*pi/2)
plot(cos.(theta), sin.(theta), aspect_ratio=:equal)
scatter!(cos.(theta), mysin.(theta))

Are we observing A=stabiltiy, B=backward stability, or C=neither?¶
The numbers \((\widetilde\cos \theta, \widetilde\sin \theta = (\operatorname{fl}(\cos \theta), \operatorname{fl}(\sin\theta))\) do not lie exactly on the unit circles.
There does not exist a \(\tilde\theta\) such that \((\widetilde\cos \theta, \widetilde \sin\theta) = (\cos\tilde\theta, \sin\tilde\theta)\)
Accuracy of backward stable algorithms (Theorem)¶
A backward stable algorithm for computing \(f(x)\) has relative accuracy
In practice, it is rarely possible for a function to be backward stable when the output space is higher dimensional than the input space.